Fun Info About How To Draw Acceleration Vector

Acceleration Vectors Example - Youtube
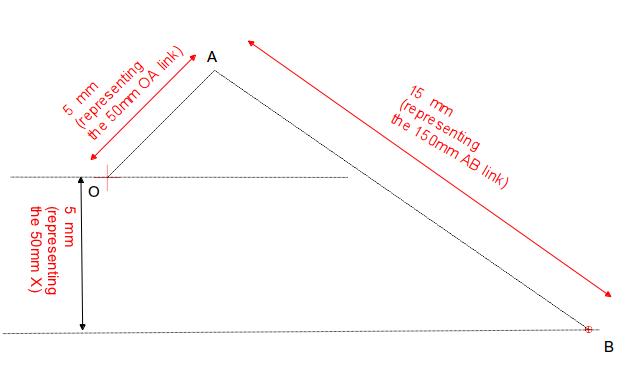
Drawing Acceleration Vector Diagram Of Four Bar Linkage Mechanism

Position, Velocity, And Acceleration Vectors - Youtube
2
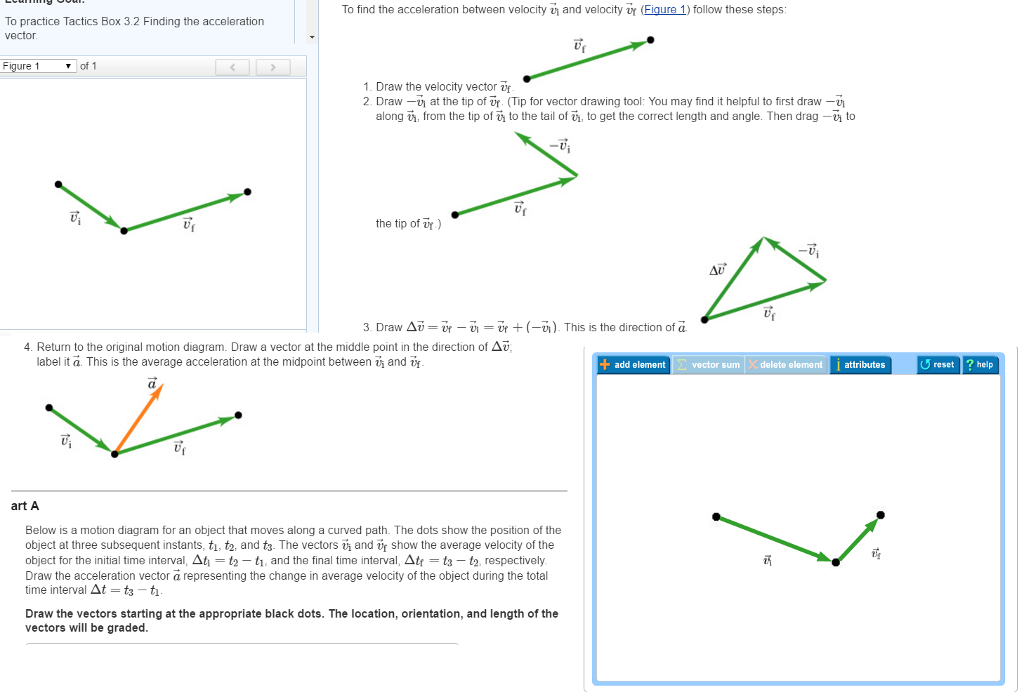
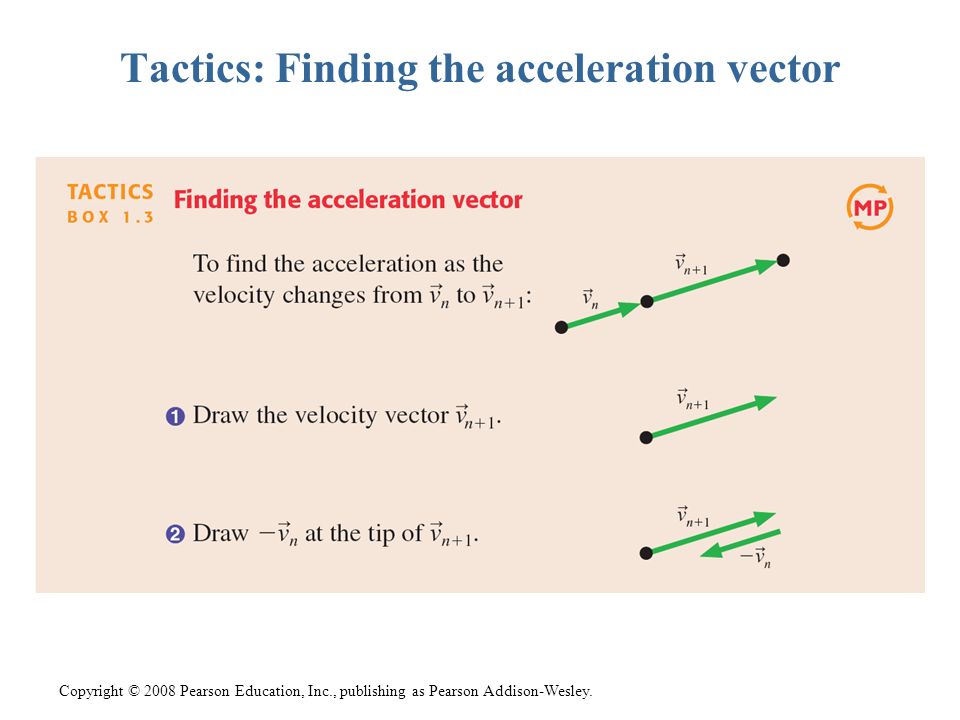
Solved To Practice Tactics Box 3.2 Finding The Acceleration | Chegg.com
Acceleration
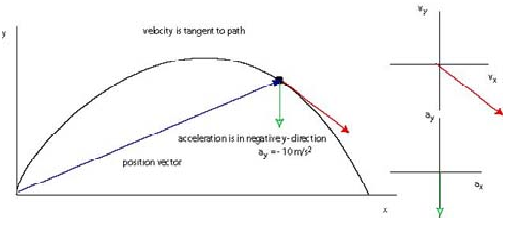
Understand how velocity and acceleration can be represented using vectors.
How to draw acceleration vector. To add the vectors (x₁,y₁) and (x₂,y₂), we add the corresponding components from each vector: #draw a vector from matplotlib.patches import fancyarrowpatch from mpl_toolkits.mplot3d import proj3d class arrow3d(fancyarrowpatch): Understand how velocity and acceleration can be represented using vectors.
Given a position function r(t) that models the position of an object over time, velocity v(t) is the derivative of position, and acceleration a(t) is the derivative of velocity,. This is a good place to start. If we find the unit tangent vector t and the unit normal.
Where u t is a unit vector tangent to the path at each point that is determined by dividing the velocity vector by its magnitude: To start, draw a set of coordinate axes. At any given point along a curve, we can find the acceleration vector ‘a’ that represents acceleration at that point.
• to investigate the acceleration vector of a body • to describe the curved path of projectile • to investigate circular motion • to describe the. The sum of (2,4) and (1,5) is (2+1,4+5), which is (3,9). This video serves as an introduction to kinematics in two or more dimensions, treating position, velocity, and acceleration as vectors.
I won't really talk about scalars much. The tangential acceleration is given by: Next, draw out the first vector with its tail (base) at the origin of the coordinate axes.
How To Graph Acceleration Vectors On Position Axis? | Physics Forums
2
2
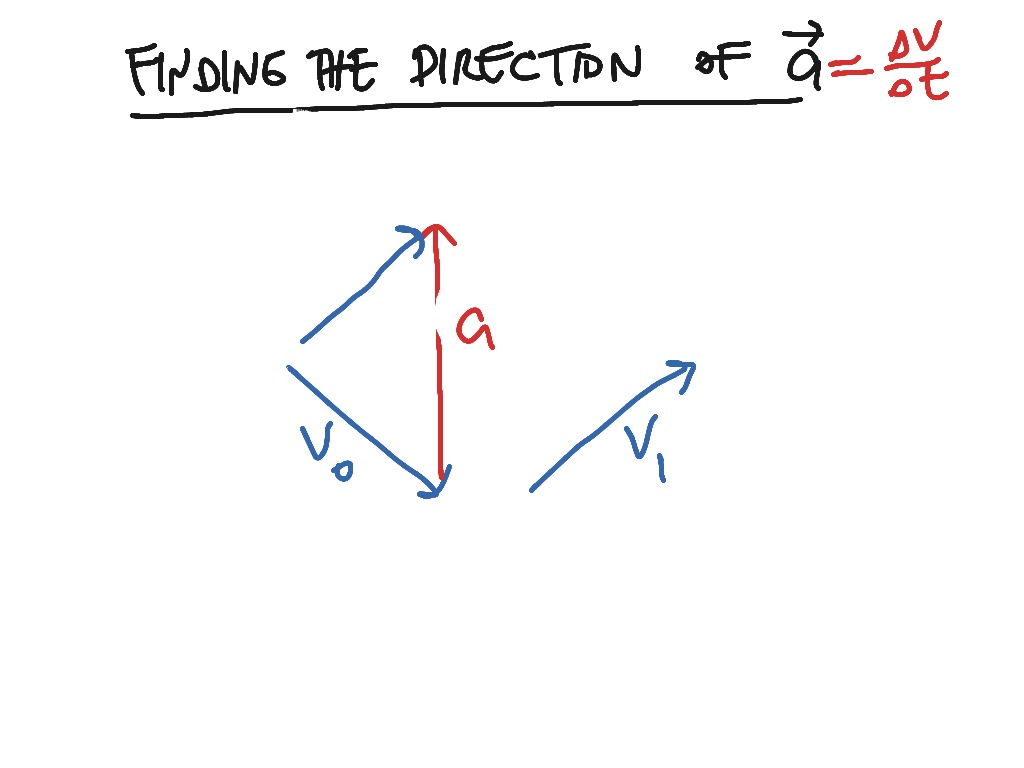
Finding The Direction Of Acceleration | Science, Kinematics Showme
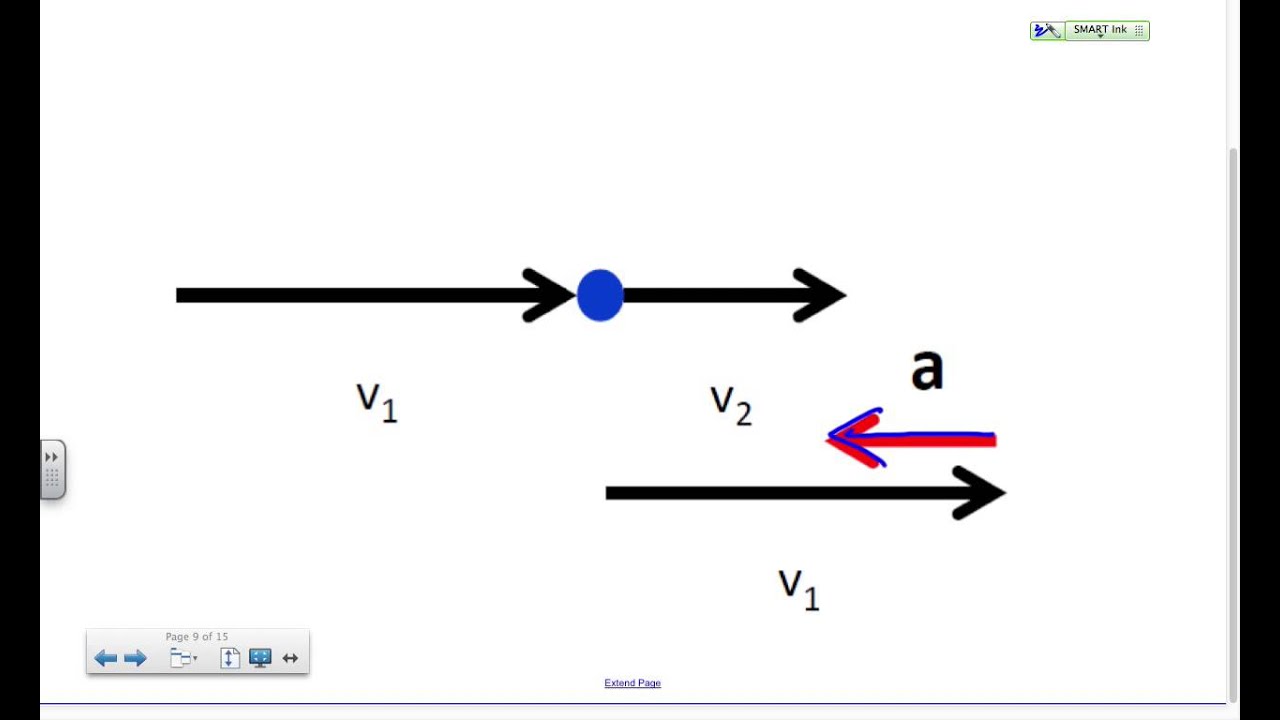
Motion Diagrams With Acceleration - Youtube
Homework And Exercises - Direction Of Acceleration Vector At The Apex A Curve Physics Stack Exchange
Chapter 1. Concepts Of Motion - Ppt Download

Color Online) Particle's Velocity & Acceleration Vectors In Space,... | Download Scientific Diagram
2
Introduction To 2 D Motion - Pwiki
2

Drawing Acceleration Vector Diagram Of Four Bar Linkage Mechanism

Drawing Acceleration Vector Diagram Of Four Bar Linkage Mechanism